
Robotic Canvas
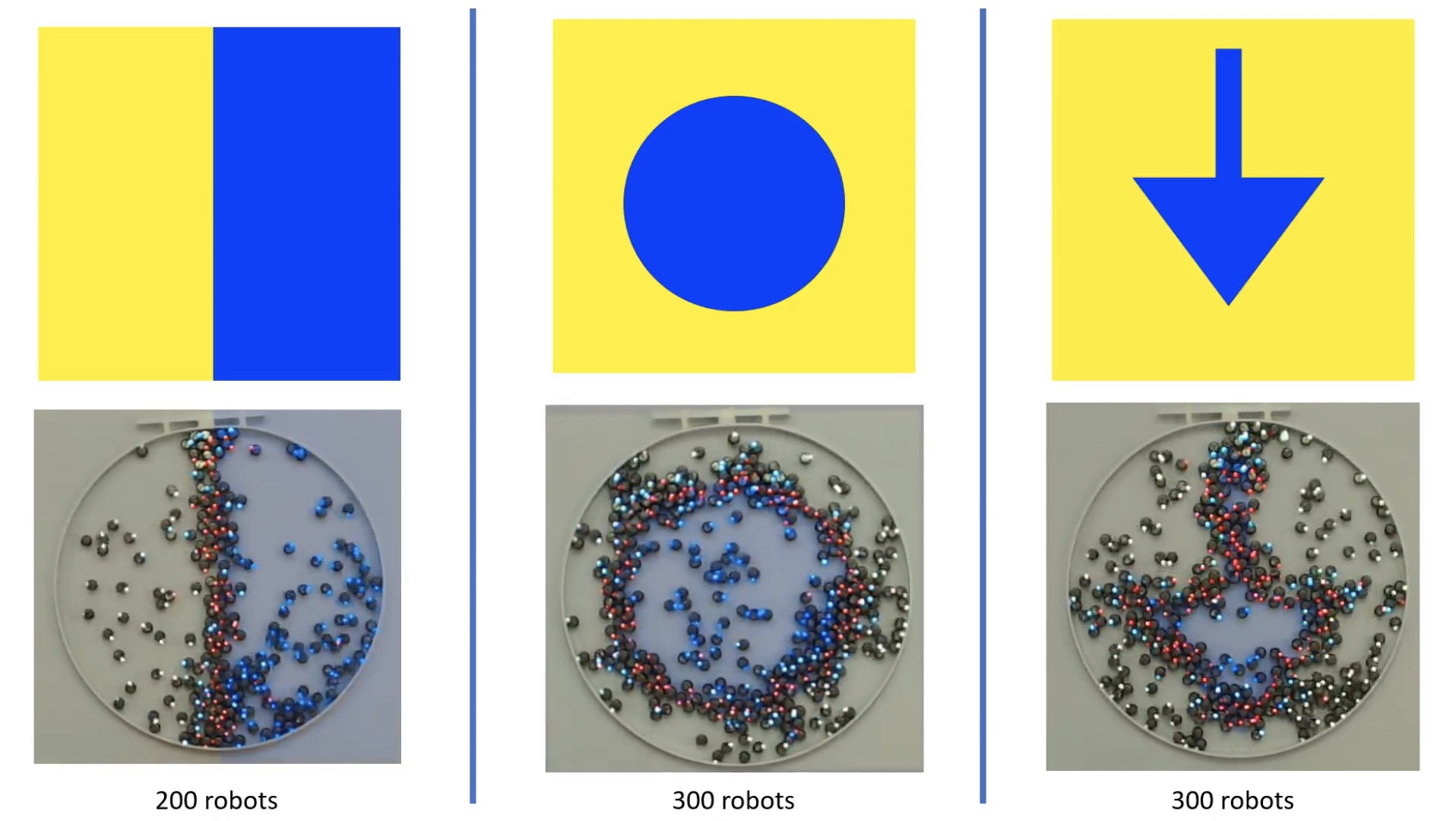
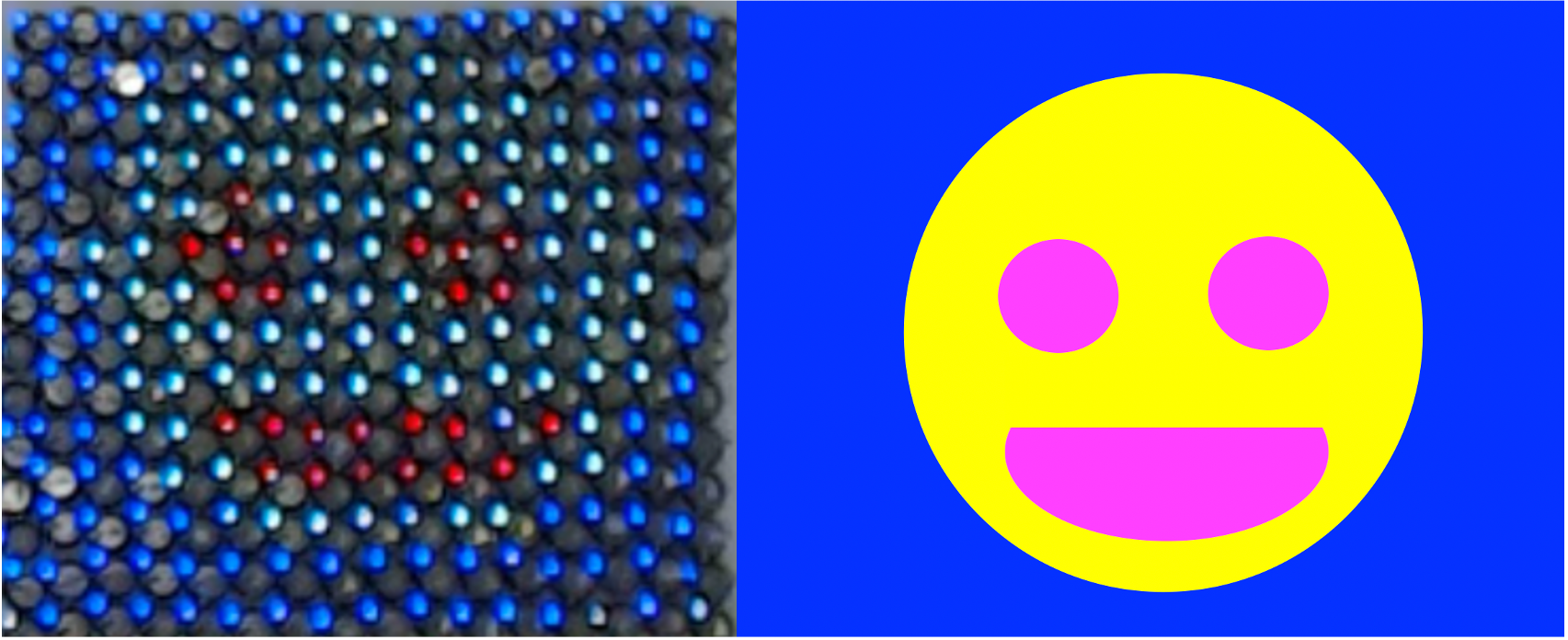
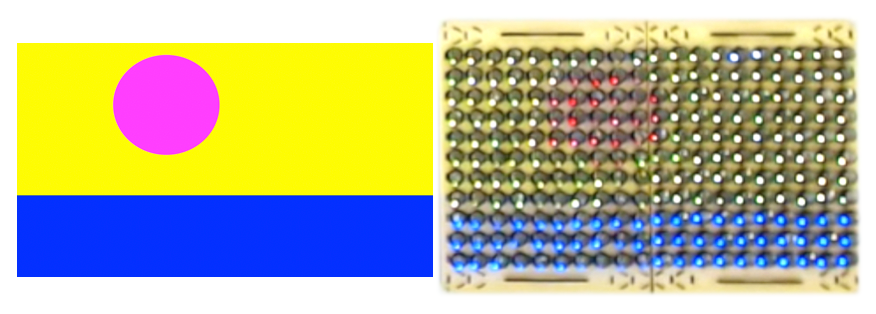
During my Robotics Master’s degree at University of Bristol, I developed Robotic Canvas, where a human and a swarm of Kilobot robots collaborate to create paintings. Through the context of art, I was able to explore and create human-swarm interaction methods that can be applied to other swarm applications as well. The robots depend entirely on local and environmental interactions to preserve the key concept of decentralization of swarm systems.
Robotic Canvas was published in ALIFE2020, as well as featured in Ro-MAN 2019 workshop: Merging Artistic and Research Practices Toward More Expressive Robotic Systems. Also, Robotics Canvas was featured in ALIFE ART, ROBOT AND VIRTUAL CREATURE GALLERY 2020. Here is a video that shows a performance with the robots as well as describes the different interaction “Painting” modes:
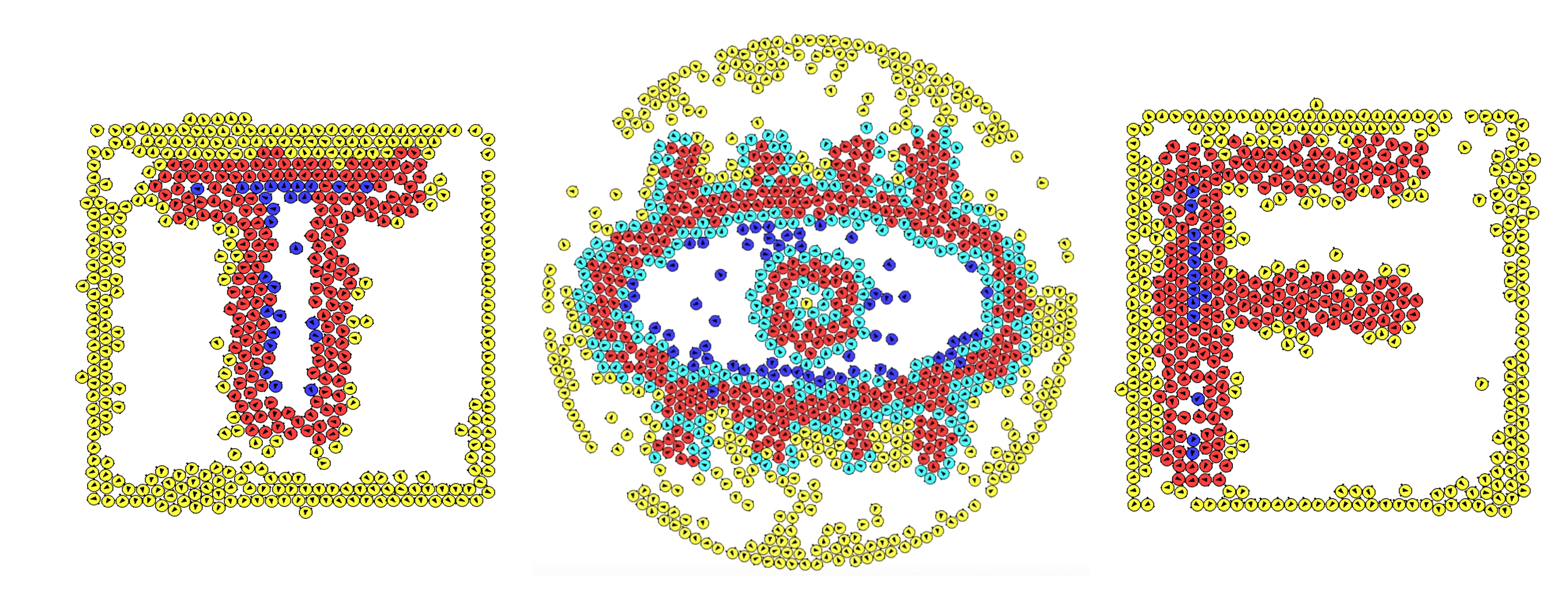
Saliency Detection And Representation
In Robotic Canvas, we have to fill the shape entirely with robots in order to represent an image. In my next bulk of work with the Kilobots, I designed an algorithm that enables the robot to detect and aggregate around salient features in images, namely edges, to still be able to represent an image but using a fewer number of robots. Here is a video that shows different shapes and animations, as well as describes the algorithm:
